The following article is from Automotive Electronics and Software , by homemade automotive
"Air Spring and Continuous Damping Control" hereinafter referred to as ASU and CDC, respectively
01 | Scope of application
This paper applies to algorithm development and validation of ASU or CDC, especially for users where the underlying software of the controller is also self-developed or controllable, and does not apply to users where the whole system is tested in a complete black box. Therefore, the test object of HIL in this paper is the controller itself rather than the whole suspension system.
02 | Simulation Prerequisites
To fulfill the MIL/HIL tests of ASU & CDC the following conditions must be met
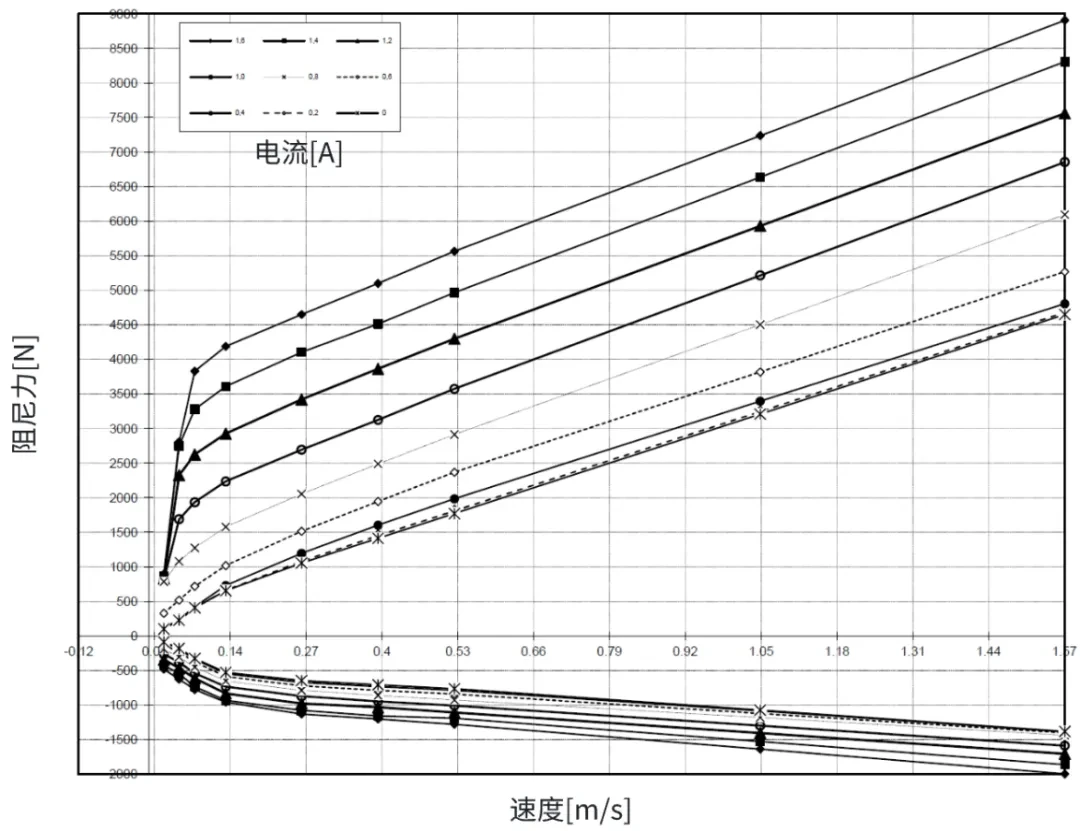
1. Create a physical model of the CDC, i.e., a CDC velocity-current-force map. Usually provided by a third-party exciter or CDC supplier, refer to the following.
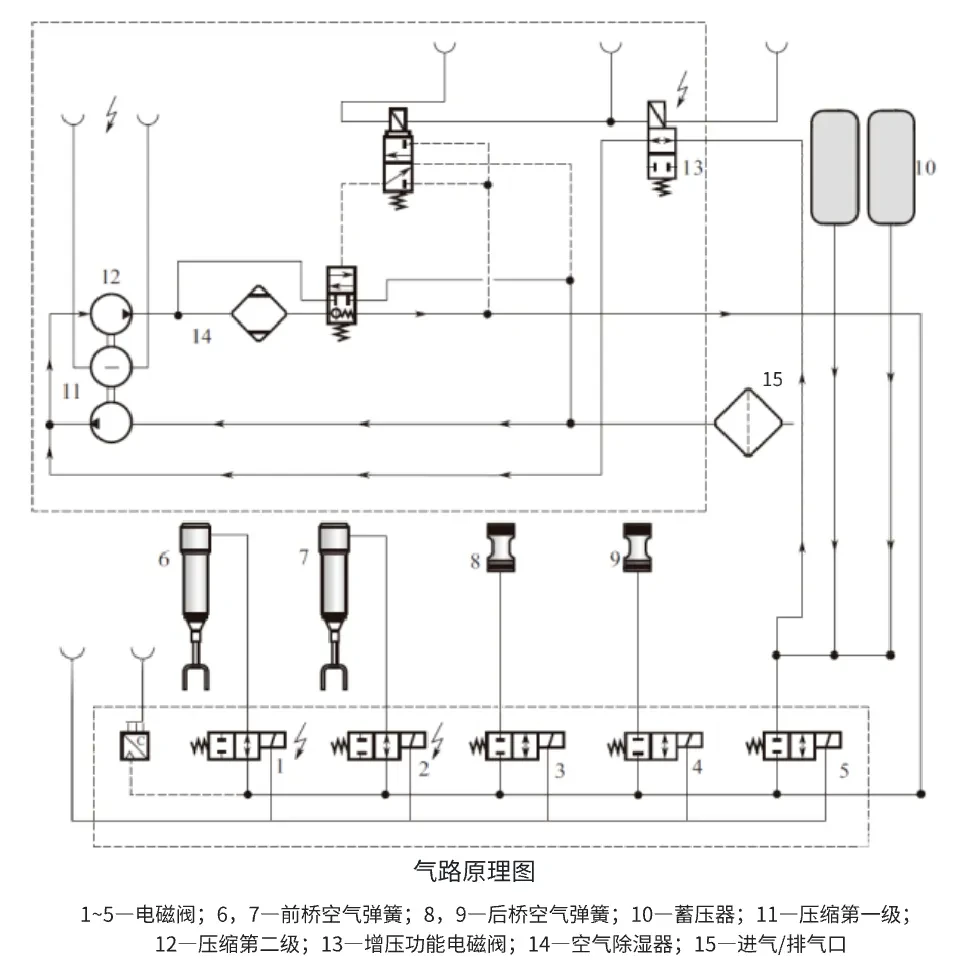
2. Establish the physical simulation model of the air spring body, pipeline, valve body and gas storage tank, etc. Party A provides the ASU air circuit schematic diagram and the physical parameters of the spring body itself. Provide the ASU and the A2L file that can control the action of each valve/motor.
3. Match the I/O interface of the controller.
- Electricity supply
- CAN
- Velocity and acceleration sensors (typically PSI5 or PWM)
- Capture ASU & CDC Solenoid Valve Current
4. Dynamics available third-party commercial software, recommended CarSim.
5. Real-time simulation system.
6. Some of the underlying software matches, such as the bypass internal air pressure sensor.
03 | SIL/HIL Simulation Implementation
Based on the physical model of ASU & CDC, matching the CarSim dynamics software, SIL simulation can be completed in Simulink environment, which is not focused here.
The prerequisite for completing HIL simulation is to have a real-time simulation system. Typically a HIL simulation system needs to consist of an upper computer, a hard real-time lower computer, associated chassis and boards, and so on. This system is often complex or not approachable.
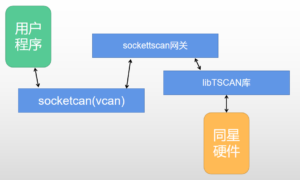
TSMaster provides a solution for setting up a soft real-time simulation environment for running dynamics models in Windows. The I/O matching is done through the CAN bus interface and CAN-enabled I/O boards (e.g. PSI5 via CAN bus), and interacts with the dynamics software in real time via memory. In addition, TSMaster has its own test case management, execution and post-processing capabilities, not to mention CAN bus simulation.
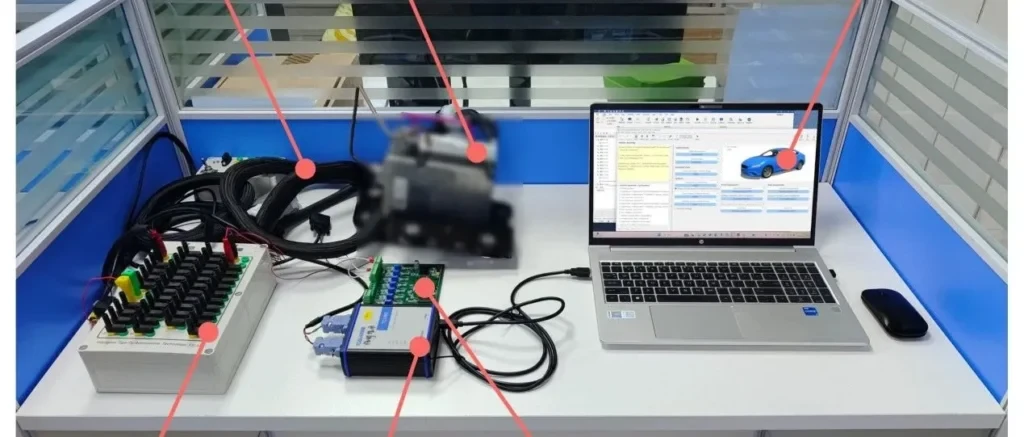
Then the I/O interface of the reference ASU & CDC shall be prepared as follows:
1. Laptop: deploy TSMaster and CarSim.
2. CAN tools: You can choose tools such as TC1014, for example.
3. Power supply & wire harness: Power supply is used to supply power to the DUT; BOB is usually used for the related wire harness connection.
4. PSI5 analog board: controlled by CAN commands.
5. Board and wire harness modification: obtain the solenoid valve action status (usually by collecting current).
For the above 4 and 5 two articles, if Party A has the bottom of the soft capabilities, it can be through the private CAN sensor signals into the signal, the solenoid valve current signal or drive status bits through the CAN out, the whole set of test systems can become more concise accordingly. Then a set of simulation system will also become as simple as the following figure.

04 | Case Sharing
Refer to section II/III, based on the necessary information input provided by Party A, the underlying software is matched, and then the test simulation system is completed, see the figure below.
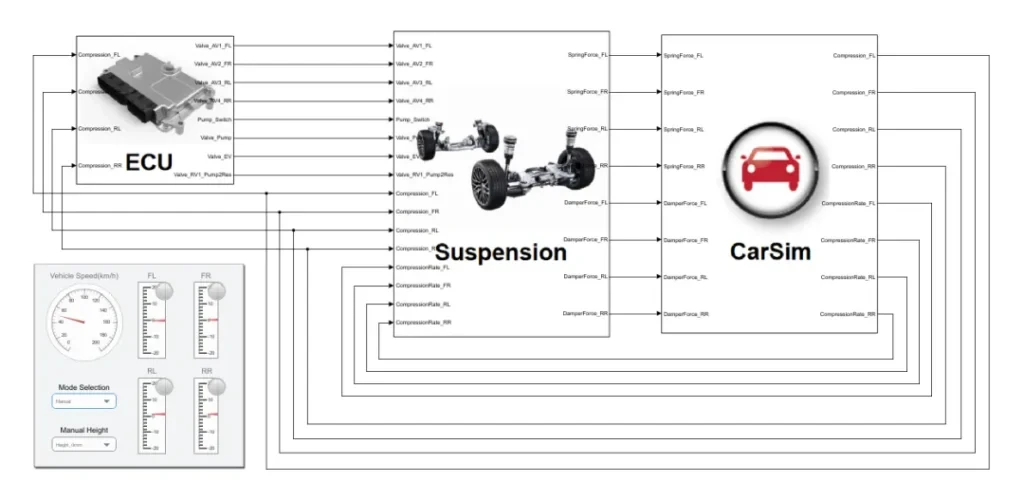
Based on this a large number of test simulations can be completed to verify the following is a brief summary of the ASU and CDC test content.
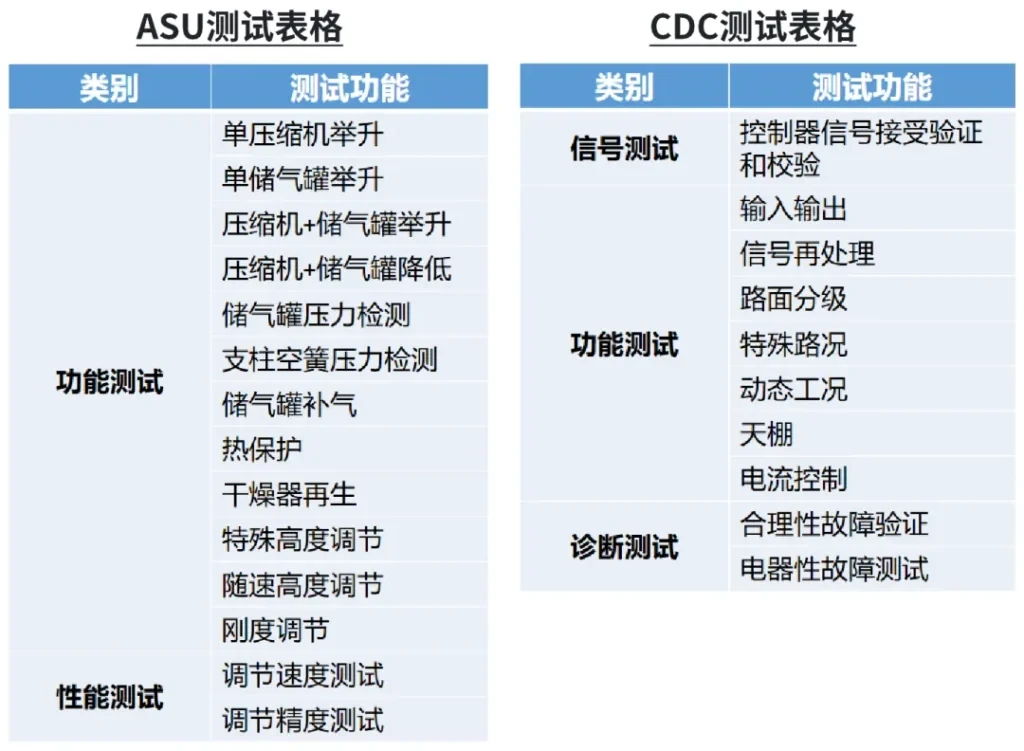
The following are examples of typical test conditions:
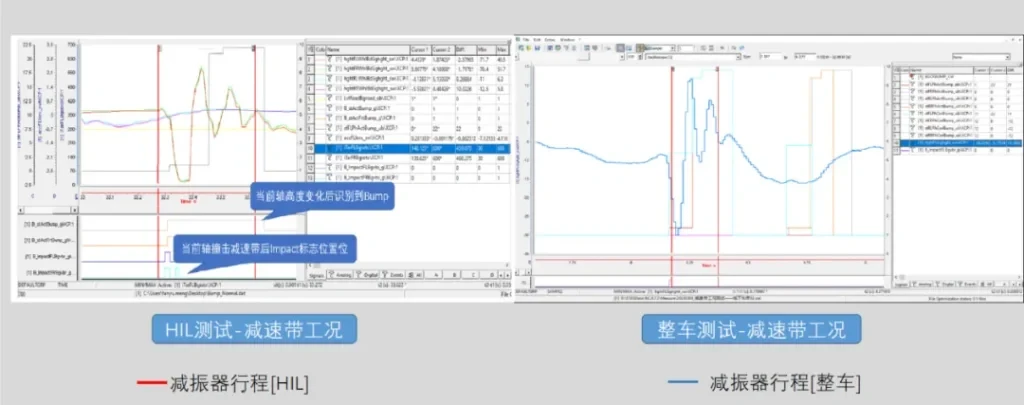
1.CDC speed bump working condition
The HIL test data can better simulate the real vehicle condition, the damper height waveform and amplitude match well, and can accurately identify the location of speed bumps.
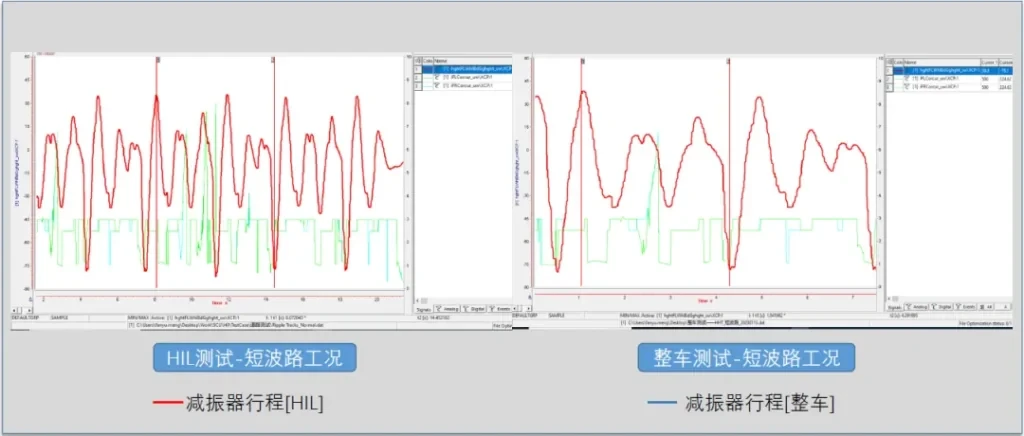
2. CDC short-wave pavement conditions
The HIL test data is also a good representation of the overall vehicle test condition, with good consistency in damper stroke waveform and amplitude.
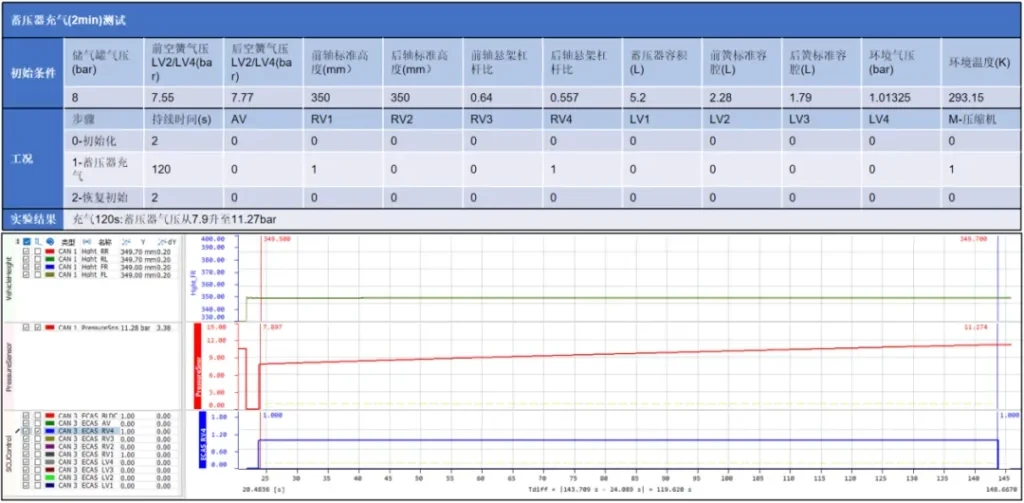
3. ASU Accumulator Gas Filling Condition
The simulation result is that the accumulator air pressure increases from 7.9 bar to 11.27 bar for 120s of inflation, which is more realistic.
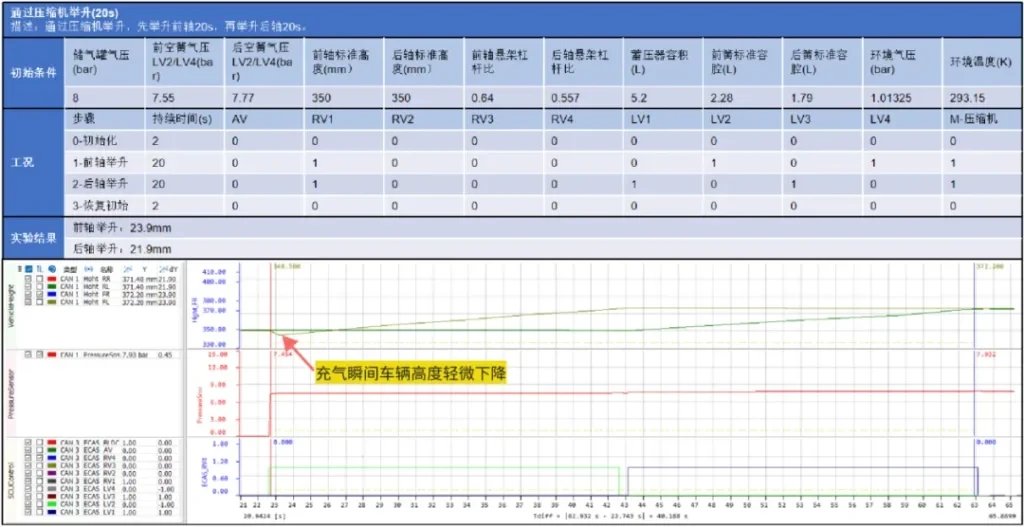
4. ASU compressor lifting condition
The front and rear axles were lifted 23.9mm and 21.9mm respectively by compressor lifting for 20s, which is also more realistic. In addition, a short and slight drop of the vehicle at the moment of inflation was also accurately simulated (because the air pressure in the pipeline was low at this time and the compressor was relatively slow to inflate).
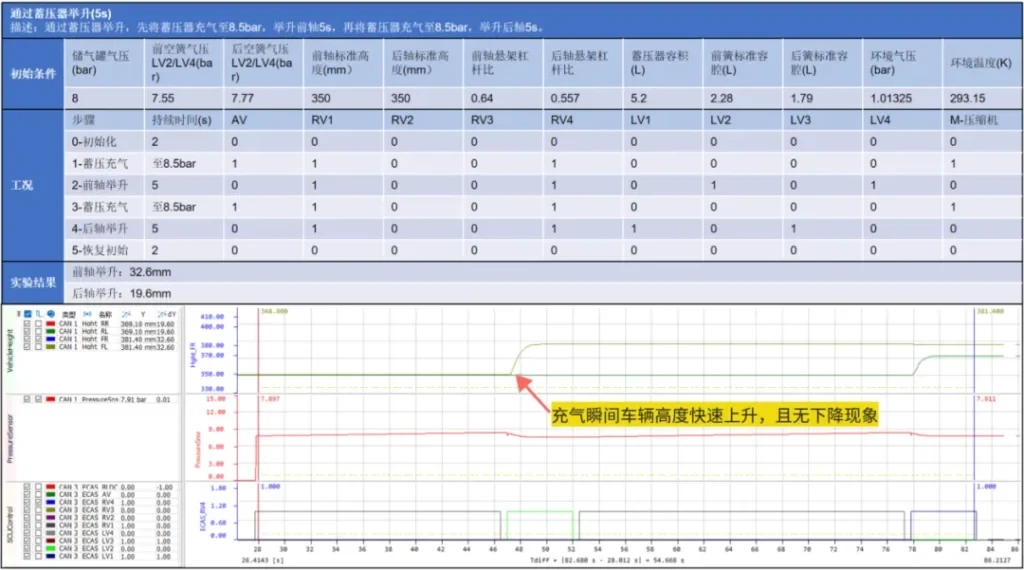
5.ASU pressure accumulator gas lift working condition
Accumulator lifting relative to the aforementioned compressor to be much more rapid, lifting 5s can make the front and rear axles were lifted 32.6mm and 19.6mm, and the moment of inflation did not appear in the compressor condition of the body down, so the simulation and the actual state is more in line with.
05 | Postscript and Personal Views
The following conclusions can be drawn from project experience:
1. The current model-based development can improve the development efficiency in the middle and early stages of algorithm development.
2. This technology path is not recommended for customers who do not have the underlying software capabilities.
3. At present, we can provide two solutions in chapter 3, 4 and 5, but we recommend using the minimalist solution (i.e., interacting with the valve status, height, and acceleration information via CAN) in the case sharing.
4. Can meet the test requirements and efficient and simple HIL system will become the mainstream of simulation. Simply stacking hardware and pursuing extreme physical performance is often counterproductive. Therefore, it is often more important to choose the appropriate technology path for different application scenarios.